ESP32 je doska mikrokontroléra založená na IoT, ktorú možno použiť na prepojenie, ovládanie a čítanie rôznych senzorov. PIR alebo pohybový senzor je jedným zo zariadení, ktoré môžeme prepojiť s ESP32 na detekciu pohybu objektu v dosahu pohybového senzora pomocou ESP32.
Predtým, ako začneme prepájať ESP32 s PIR senzorom, musíme vedieť, ako fungujú prerušenia a ako ich čítať a spracovávať v ESP32. Ďalej musíme pochopiť základný koncept funkcií delay() a millis() v programovaní ESP32.
Poďme diskutovať o práci PIR s ESP32 podrobne.
Tu je obsah tohto článku:
1: Čo sú prerušenia
Väčšina udalostí, ktoré sa dejú v programovaní ESP32, prebieha sekvenčne, čo znamená vykonávanie kódu riadok po riadku. Na spracovanie a riadenie udalostí, ktoré sa nemusia spúšťať počas sekvenčného vykonávania kódu, an Prerušenia sa používajú.
Napríklad, ak chceme vykonať určitú úlohu, keď nastane nejaká špeciálna udalosť, alebo ak sa na digitálne piny mikrokontroléra dostane spúšťací signál, použijeme prerušenie.
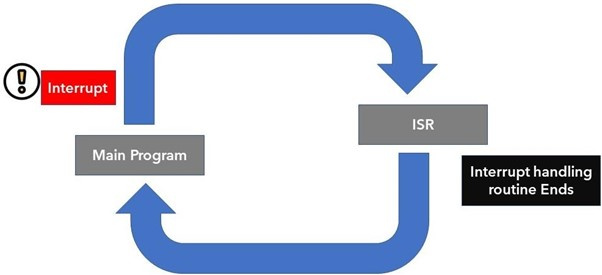
Pri prerušení nemusíme neustále kontrolovať digitálny stav vstupného kolíka ESP32. Keď dôjde k prerušeniu, procesor zastaví hlavný program a zavolá sa nová funkcia, ktorá je známa ako ISR ( Prerušiť servisnú rutinu ). Toto ISR funkcia spracuje prerušenie spôsobené po tomto návrate späť do hlavného programu a začatie jeho vykonávania. Jedným z príkladov ISR je PIR pohybový senzor ktoré generuje prerušenie po zistení pohybu .
1.1: Prerušuje piny v ESP32
Externé alebo hardvérové prerušenie môže byť spôsobené akýmkoľvek hardvérovým modulom, ako je dotykový senzor alebo tlačidlo. Dotykové prerušenia sa vyskytujú, keď je detekovaný dotyk na kolíkoch ESP32 alebo prerušenie GPIO možno použiť aj pri stlačení klávesu alebo tlačidla.
V tomto článku spustíme prerušenie pri detekcii pohybu pomocou PIR senzora s ESP32.
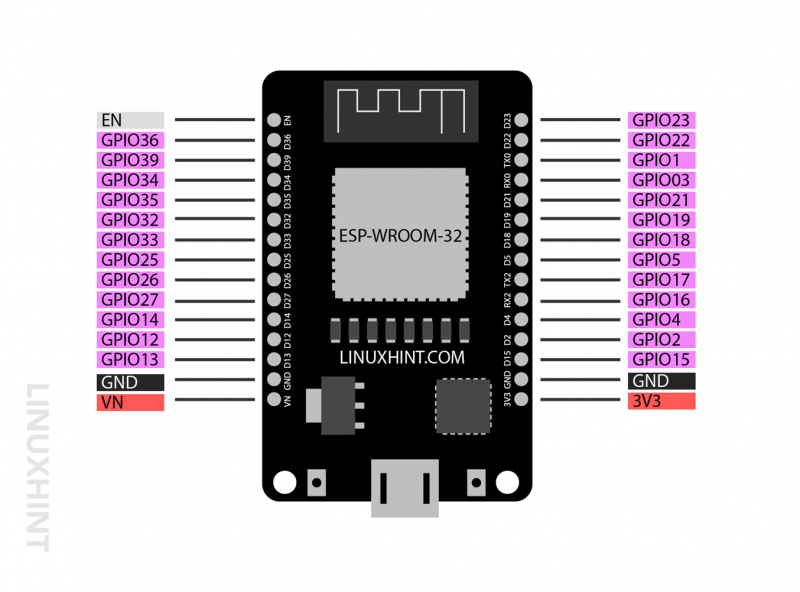
Takmer všetky piny GPIO okrem 6 integrovaných pinov SPI, ktoré sa zvyčajne dodávajú 36 -pin verziu dosky ESP32 nemožno použiť na účely volania prerušenia. Ak chcete prijať externé prerušenie, nasledujú kolíky zvýraznené fialovou farbou, ktorú môžete použiť v ESP32:
Tento obrázok je 30-kolíkovým ESP32.
1.2: Vyvolanie prerušenia v ESP32
Pre použitie prerušenia v ESP32 môžeme zavolať pripojiťPrerušenie() funkciu.
Táto funkcia akceptuje nasledujúce tri argumenty:
-
- GPIO pin
- Funkcia, ktorá sa má vykonať
- Režim
1: GPIO pin je prvý argument volaný vo vnútri pripojiťPrerušenie() funkciu. Napríklad, ak chcete použiť digitálny kolík 12 ako zdroj prerušenia, môžeme to nazvať pomocou digitalPinToInterrupt(12) funkciu.
2: Funkcia ktorý sa má vykonať, je program spustený vždy, keď sa prerušenie dosiahne alebo sa spustí externým alebo interným zdrojom. Môže to byť buď blikanie LED alebo zapnutie požiarneho poplachu.
3: Režim je tretí a posledný argument, ktorý funkcia prerušenia potrebuje. Popisuje, kedy spustiť prerušenie. Je možné použiť nasledujúce režimy:
-
- Nízka: Spustite prerušenie vždy, keď je definovaný pin GPIO nízky.
- vysoká: Spustite prerušenie vždy, keď je definovaný pin GPIO vysoký.
- Zmeniť: Spustiť prerušenie zakaždým, keď GPIO pin zmení svoju hodnotu z vysokej na nízku alebo naopak.
- pád: Je to režim, ktorý spustí prerušenie, keď určitý kolík začne klesať z vysokého stavu na nízky.
- Rastúce: Je to režim, ktorý spustí prerušenie, keď určitý kolík začne stúpať z nízkeho stavu na vysoký.
Dnes budeme používať Stúpajúci režim ako tretí argument pre funkciu prerušenia vždy, keď PIR senzor zaznamená prerušenie LED alebo sa rozsvieti senzor, pretože prejde z nízkeho stavu do vysokého.
2: Časovače v programovaní ESP32
Časovače v programovaní mikrokontrolérov hrajú významnú úlohu pri vykonávaní inštrukcií pre konkrétnu periódu časovača alebo v konkrétnom čase.
Dve hlavné funkcie bežne používané na spustenie výstupu sú meškanie () a milis() . Rozdiel medzi oboma funkciami delay() zastaví zvyšok programu, keď sa začne vykonávať, kým millis() beží po definovanú dobu a potom sa program vráti späť k hlavným funkciám.
Tu budeme používať LED diódu s PIR senzorom a nechceme ju nepretržite svietiť po spustení prerušenia. Použijeme funkciu millis(), ktorá nám umožňuje žiariť na určitý definovaný čas a potom sa znova vráti k pôvodnému programu, keď uplynie časová značka.
2.1: funkcia delay().
Funkcia delay() je celkom jednoduchá, vyžaduje len jeden argument, ktorý je pani typu unsigned long. Tento argument predstavuje čas v milisekundách, počas ktorého chceme program pozastaviť, kým neprejde na ďalší riadok.
Napríklad nasledujúca funkcia zastaví program 1 sek .
meškanie ( 1000 )
delay() je druh blokovacej funkcie pre programovanie mikrokontrolérov. delay() zablokuje spustenie zvyšku kódu, kým sa čas tejto konkrétnej funkcie nedokončí. Ak chceme vykonať viacero inštrukcií, mali by sme sa vyhnúť používaniu oneskorovacích funkcií, namiesto toho môžeme použiť milisové alebo externé RTC moduly.
2.2: funkcia milis().
funkcia millis() vracia počet milisekúnd, ktoré uplynuli od spustenia aktuálneho programu dosky ESP32. Napísaním niekoľkých riadkov kódu môžeme ľahko vypočítať aktuálny čas v ľubovoľnom prípade pri spustení kódu ESP32.
millis je široko používaný tam, kde potrebujeme spustiť viacero úloh bez blokovania zvyšku kódu. Tu je syntax funkcie millis, ktorá sa používa na výpočet toho, koľko času uplynulo, aby sme mohli vykonať konkrétnu inštrukciu.
ak ( currentMillis - predchádzajúciMillis > = interval ) {predchádzajúciMillis = aktuálnyMillis;
}
Tento kód odčíta predchádzajúcu milis() od aktuálnej millis(), ak sa odčítaný čas rovná definovaniu intervalu, v ktorom sa vykoná konkrétna inštrukcia. Povedzme, že chceme blikať LED na 10 sekúnd. Po každých 5 minútach môžeme nastaviť časový interval na 5 minút (300 000 ms). Kód skontroluje interval pri každom spustení kódu a po jeho dosiahnutí bude LED blikať na 10 sekúnd.
Poznámka: Tu budeme používať funkciu millis () na prepojenie ESP32 s PIR senzorom. Hlavným dôvodom použitia milli a nie oneskorenia je, že funkcia millis() neblokuje kód ako funkcia delay(). Takže akonáhle PIR zaznamená pohyb, vygeneruje sa prerušenie. Použitie funkcie prerušenia millis() spustí LED na definovanú dobu a potom, ak sa pohyb zastaví, funkcia millis() sa resetuje a počká na ďalšie prerušenie.
V prípade, že by sme použili funkciu delay(), úplne zablokuje kód a akékoľvek spôsobené prerušenie ESP32 neprečíta, čo vedie k zlyhaniu projektu.
3: Prepojenie PIR senzora s ESP32
Tu budeme používať funkciu millis () v kóde Arduino IDE, pretože chceme spustiť LED vždy, keď PIR senzor zaznamená nejaký pohyb. Táto LED dióda bude svietiť nastavený čas a potom sa vráti do normálneho stavu.
Tu je zoznam komponentov, ktoré budeme potrebovať:
-
- Vývojová doska ESP32
- PIR pohybový senzor (HC-SR501)
- LED
- 330 ohmový odpor
- Spojovacie vodiče
- Breadboard
Schematické pre PIR senzor s ESP32:
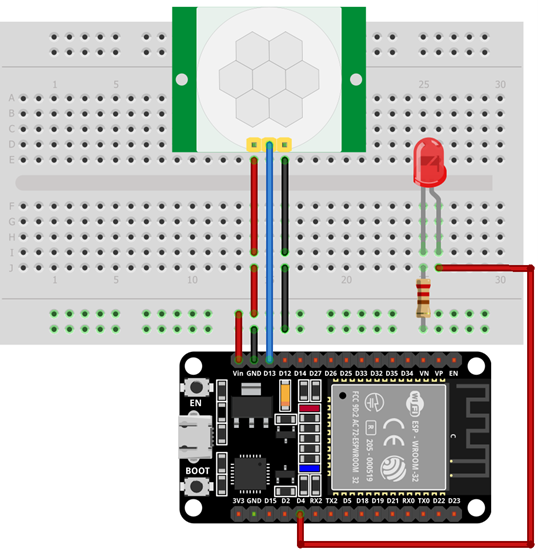
Pinové pripojenia ESP32 s PIR senzorom sú:
| ESP32 | PIR senzor |
| prísť | Vcc |
| GPIO13 | VON |
| GND | GND |
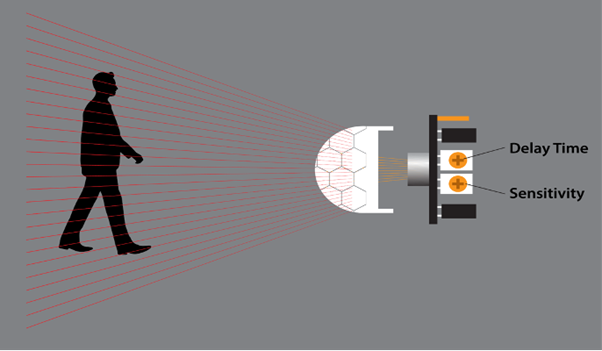
3.1: PIR pohybový senzor (HC-SR501)
PIR je skratka pre pasívny infračervený senzor . Využíva dvojicu pyroelektrických senzorov, ktoré detegujú teplo okolo svojho okolia. Oba tieto pyroelektrické senzory ležia jeden po druhom a keď sa objekt dostane do ich dosahu, zmena tepelnej energie alebo rozdiel signálu medzi oboma týmito senzormi spôsobí, že výstup PIR senzora bude NÍZKY. Keď výstupný kolík PIR klesne na NÍZKU, môžeme nastaviť konkrétnu inštrukciu, ktorá sa má vykonať.
Nasleduje charakteristika PIR senzora:
-
- Citlivosť je možné nastaviť v závislosti od umiestnenia projektu (napríklad snímanie pohybu myši alebo lístia).
- PIR senzor je možné nastaviť na ako dlho detekuje objekt.
- Široko používaný v domácich bezpečnostných alarmoch a iných aplikáciách na detekciu pohybu na báze tepla.
3.2: Pinout HC-SR501
PIR HC-SR501 sa dodáva s tromi kolíkmi. Dva z nich sú napájacie kolíky pre Vcc a GND a jeden je výstupný kolík pre spúšťací signál.
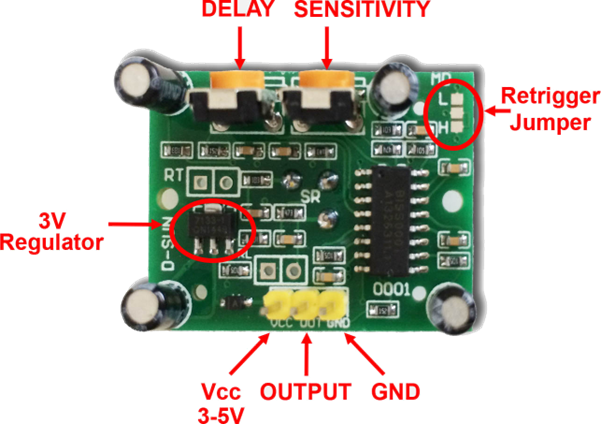
Nasleduje popis pinov snímača PIR:
| Pin | názov | Popis |
| 1 | Vcc | Vstupný kolík pre snímač Pripojte k kolíku ESP32 Vin |
| dva | VON | Výstup senzora |
| 3 | GND | GND snímača |
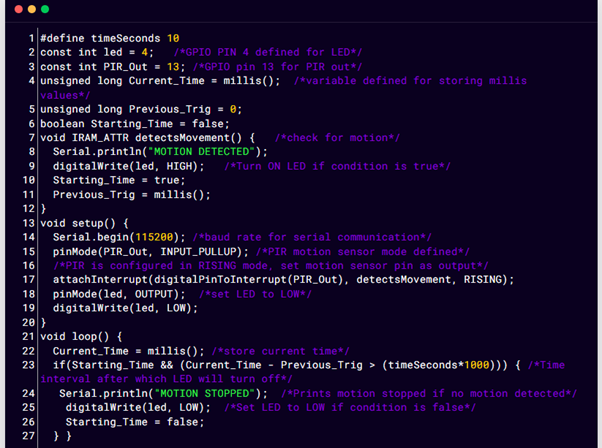
3.3: Kód
Teraz na programovanie ESP32 napíšte daný kód v editore Arduino IDE a nahrajte ho do ESP32.
#define timeSekundy 10const int led = 4 ; /* GPIO PIN 4 definované pre LED */
const int PIR_Out = 13 ; /* GPIO pin 13 pre PIR von */
unsigned long Current_Time = milis ( ) ; /* definovaná premenná pre ukladanie milisových hodnôt */
unsigned long Previous_Trig = 0 ;
boolean Starting_Time = falošný ;
void IRAM_ATTR detekuje pohyb ( ) { /* skontrolovať pre pohybu */
Serial.println ( 'ZISTENÝ POHYB' ) ;
digitalWrite ( vedený, VYSOKÝ ) ; /* Zapnite LED ak podmienkou je pravda */
Starting_Time = pravda ;
Previous_Trig = milis ( ) ;
}
neplatné nastavenie ( ) {
Serial.začať ( 115200 ) ; /* prenosová rýchlosť pre sériová komunikácia */
pinMode ( PIR_Out, INPUT_PULLUP ) ; /* Definovaný režim snímača pohybu PIR */
/* PIR je nakonfigurovaný v režim stúpania, nastaviť kolík snímača pohybu ako výkon */
pripojiťPrerušenie ( digitalPinToInterrupt ( PIR_Out ) , detekuje Pohyb, stúpanie ) ;
pinMode ( led, VÝSTUP ) ; /* nastaviť LED na LOW */
digitalWrite ( vedený, NÍZKY ) ;
}
prázdna slučka ( ) {
Aktuálny_čas = milis ( ) ; /* uložiť prúd čas */
ak ( Starting_Time && ( Current_Time - Previous_Trig > ( časSekundy * 1000 ) ) ) { /* Časový interval po ktoré LED zhasne */
Serial.println ( 'POHYB ZASTAVENÝ' ) ; /* Pohyb tlače sa zastavil ak nebol zistený žiadny pohyb */
digitalWrite ( vedený, NÍZKY ) ; /* Nastavte LED na LOW ak podmienkou je falošný */
Starting_Time = falošný ;
}
}
Kód začal definovaním GPIO pinov pre LED a PIR výstup. Ďalej sme vytvorili tri rôzne premenné, ktoré pomôžu zapnúť LED pri detekcii pohybu.
Tieto tri Premenné sú Current_Time, Previous_Trig, a Starting_Time. Tieto premenné uložia aktuálny čas, čas, kedy je detekovaný pohyb a časovač po detekcii pohybu.
V časti nastavenia sme najskôr definovali sériovú prenosovú rýchlosť pre komunikáciu. Ďalšie použitie pinMode() nastavte snímač pohybu PIR ako INPUT PULLUP. Na nastavenie prerušenia PIR pripojiťPrerušenie() je popísaný. GPIO 13 je opísaný na detekciu pohybu v režime RISING.
V ďalšej časti kódu loop() sme pomocou funkcie millis() zapli a zhasli LED diódu, keď sa dosiahne spúšť.
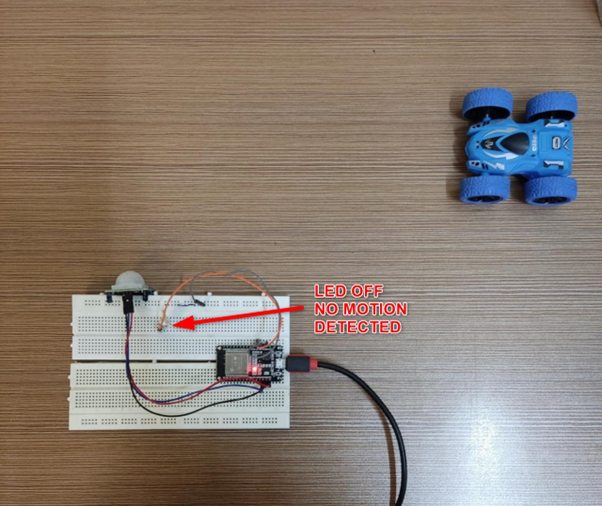
3.4: Výstup
Vo výstupnej sekcii vidíme, že objekt je mimo dosahu PIR senzora, takže LED je otočený VYPNUTÉ .
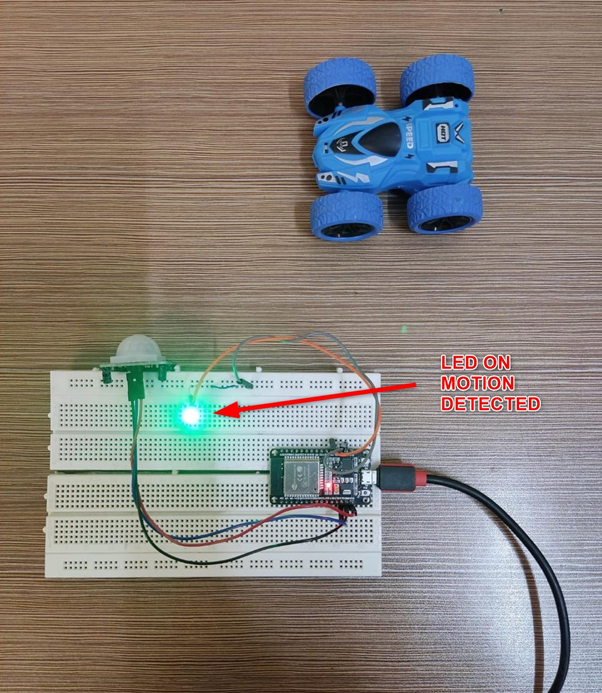
Teraz sa pohyb detekovaný LED PIR senzorom rozsvieti ON pre 10 sek potom, ak sa nezaznamená žiadny pohyb, zostane VYPNUTÉ do prijatia ďalšieho spúšťača.
Nasledujúci výstup zobrazuje sériový monitor v Arduino IDE.
Záver
PIR senzor s ESP32 môže pomôcť detekovať pohyb objektov prechádzajúcich jeho rozsahom. Pomocou funkcie prerušenia v programovaní ESP32 môžeme spustiť odozvu na niektorom špecifickom pine GPIO. Keď sa zistí zmena, spustí sa funkcia prerušenia a rozsvieti sa LED dióda.